


Part 1 of this article ran in Dataweek 31 March 2010
Connecting GPS receivers to a GPS signal generator
Presenting signals to a GPS receiver can present several challenges. The factors involved are:
* Receiver may not have an external antenna connection.
* RF power to the receiver is very low.
* Power to the receiver must be known accurately to make good measurements.
* Receivers tend to have active antenna connections.
* Some receivers automatically switch between internal and external connections.
Receivers with no external connections
For receivers with no external connections, a radiated signal must be presented. This is called radiated testing or over-the-air (OTA) testing. It involves connecting the signal generator to some kind of antenna that radiates the signal to the receiver antenna. Since these radiated signals may interfere with the real GPS signals, this radiated testing should only be done inside an RF chamber to prevent interference.
This scenario presents some additional problems:
* Calibration of power to the antenna can be difficult.
* The external antenna expects a circularly polarised signal – it is best to use helical or stacked dipole antennas to generate circularly polarised signals.
* The distance between the transmitter and the receiver should be at least several wavelengths to avoid ‘near field’ couplings.
Receivers with external connections
Receivers with external connections present somewhat fewer problems. They require what is called ‘conductive’ testing, which involves no radiation of signals over the air – see Figure 5. The signal generator usually cannot be directly connected to the receiver due to several problems:
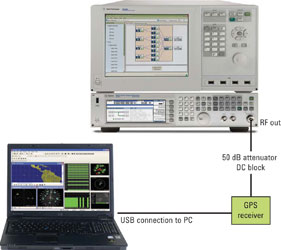
* Most GPS receivers expect active antennas – this means they supply a DC voltage to the antenna connector. The DC voltage may damage the signal generator, so it must be blocked. In-line DC blocking devices are commercially available.
* In addition, some receivers ‘sense’ current draw on the DC supply. If there is no current drawn, they may assume that no antenna is connected. In such cases, the current draw must be simulated by some resistive load and perhaps a series inductor between the signal line and the ground. Such a device may need to be custom built, depending on receiver requirements.
* Signal generators typically cannot generate the low level signals required directly. In some cases, a signal level as low as -155 dBm could be required, which means that an external attenuation device will likely be needed.
In both radiated and conductive testing, the power delivered to the receiver must be carefully calibrated if meaningful, repeatable results are to be obtained. For a typical signal with eight active satellites, the net power delivered to the receiver will need to be between -125 and -150 dBm.
Typical GPS receiver tests
The following are representative of the tests performed on GPS receivers. Most receivers will not be subjected to all of these tests, or perhaps will be subjected to them only during some design verification stage. Other tests might be done at a manufacturing level to determine if the receiver is responding according to desired or specified parameters.
Perhaps the most common tests are cold start TTFF and location accuracy. Other tests becoming more popular include sensitivity and multipath testing, which are built on top of TTFF and location accuracy. One general note for all of these tests is that they are sensitive to the exact positions and movements of satellites. This means that the results are going to be variable unless the tests are repeated with exactly the same time in the same scenario.
Furthermore, such a ‘repeatable’ number may not be representative of the receiver’s performance in general. Typical measurements must be performed under different start times, dates and locations. These measurements are then averaged to provide a meaningful value.
TTFF tests
Cold start TTFF
In this test, the receiver is placed into a cold start state – usually by some command sent to the receiver through a test connection – and then a fairly strong signal is sent. The time it takes for the receiver to determine its first good location fix is recorded. Typical figures quoted by modern chipsets are in the 40 to 50 second range. This is perhaps the most common type of testing done for GPS receivers. Normally, this test is done many times over many conditions and the results are averaged.
Cold start TTFF times may vary depending on the scenario and the time into the scenario due to the different numbers and positions of satellites in different scenarios and even during different times of the same scenario. Most repeatable results will be obtained if the TTFF measurement is taken at the same time in the same scenario. However, this repeatable time may not be representative of all scenarios.
A good design characterisation test (evaluation, design verification) would do many hundreds of cold start TTFF tests at different locations. A good manufacturing variation test would do several tests of cold start TTFF with the same time, same scenario (restart scenario at same time for each test).
Warm start TTFF
Warm start TTFF testing is less commonly done than cold start TTFF testing. The test is usually conducted by sending a ‘warm start’ command to the receiver. This type of testing is more difficult because the receiver must first be exposed to the scenario for about 15 minutes so that it can receive the complete almanac data.
Other characteristics are virtually the same as for cold-start TTFF testing.
To repeat this test at the same scenario time (15 minutes or so into the scenario) may take a long time unless the signal generator can restart 15 minutes into the scenario.
Hot start TTFF
Hot start testing is less commonly done than cold start TTFF testing, but it is perhaps a bit more common than warm start testing. The test is usually conducted by sending a ‘hot start’ command to the receiver. This type of testing is more difficult because the receiver must first be exposed to the scenario for about 15 minutes so that it can receive the complete almanac data.
Other characteristics are virtually the same as for cold-start TTFF testing. To repeat this test at the same scenario time (15 minutes or so into the scenario) may take a long time unless the signal generator can ‘time-warp’ to restart 15 minutes into the scenario.
Location accuracy
Location accuracy refers to the ability to achieve a location fix that is as close as possible to the desired position, both in repeatability and accuracy. There are several variations of location accuracy testing, as follows:
* A relative location accuracy test refers to comparing the location fixes obtained by cold/warm/ hot starting, while at the same time locating and comparing the variation between fixes. A low variation means that the receiver can achieve a relatively accurate location fix, which is good if one wants to return to the same location, using the same receiver, but does not care too much about how close the longitude/latitude/altitude numbers are to the actual location.
* The absolute location accuracy test refers to the process of comparing the location fixes obtained by cold/warm/hot starting, while at the same time locating and comparing the variation between the location fixes and the ideal location provided by the scenario.
* Moving or dynamic location accuracy tests refer to a scenario that simulates movement of the receiver while conducting the accuracy tests described above.
Reacquisition time
In this test, the performance of the receiver is characterised in a scenario where the signal is greatly reduced or interrupted for some short period of time and is then restored. An example of this would be a vehicle going through a tunnel or under some heavy tree cover. In this case the receiver is briefly unable to track most or all of the satellites, but must re-acquire (track) the signal when ‘visibility’ is restored. This scenario can be simulated by briefly reducing or turning off the signal generator power and then restoring it without restarting the scenario.
A related test would involve interrupting the signals from only a subset of the satellites. An example of this would be driving behind a building or hill which temporarily blocks out the signals from part of the sky. The results from this test will usually be compared with signals above the minimal sensitivity levels (good signal conditions).
Sensitivity
A GPS receiver really has two different sensitivity levels – acquisition sensitivity and tracking sensitivity.
Acquisition sensitivity
Acquisition sensitivity refers to the minimum signal level that allows the receiver to successfully perform a cold start TTFF within a specified timeframe. During the signal acquisition process, the signal level must be higher than during the tracking process because the time synchronisation is not known. An example of this may be identified as the minimum power level to allow a successful cold start TTFF of 100 seconds or less.
One type of acquisition sensitivity test is the single-satellite sensitivity test. In this test, a signal with a known amplitude and static Doppler shift are presented to the receiver. A receiver cold start is performed, and the time to acquisition is measured. Power levels are then decreased until the receiver can no longer acquire the signal.
This test can be repeated at several different Doppler shifts, and a set of curves depicting the power versus acquisition time at various Doppler shifts can be prepared. Such curves can be used to characterise the acquisition sensitivity of a receiver under various Doppler conditions.
Tracking sensitivity
Tracking sensitivity refers to the minimum signal level that allows the receiver to maintain a location fix within some specified degree of accuracy. This is generally a much lower signal level than the acquisition sensitivity level. As the signal level is reduced, the ability of the receiver to recover the navigation message data stream will decrease and bit errors will be induced. However, since the Doppler frequency and the timing of the signal are known, the tracking loops can still operate successfully.
As signal levels continue to decrease, eventually the noise will be so great that it will introduce noise into the tracking loops and the time and/or frequency synchronisation will degrade. These conditions will begin to impact the accuracy of the location fix. As the signal level continues to decrease, the system will incrementally lose the ability to track satellites until eventually the receiver is not able to compute a location fix.
Typically the tracking sensitivity is measured as the minimum power to maintain specific location accuracy. Again, this measurement is highly dependent on the scenario and the time into the scenario, so the only meaningful measurement is an average obtained over many tests conducted at different times in different scenarios.
Interference testing
Interference is a common problem affecting GPS receivers. Interference can come from classical sources such as RFI, receiver desensitisation due to strong out-of-band signals, intentional jamming transmissions or intentional spoofing transmissions. Interference testing is a type of metatest, in that some of the above tests such as location accuracy or TTFF are done with the addition of some kind of interfering signal.
Multipath testing
In some cases, the signal from a single satellite arrives at the receiver via two or more paths. One path is typically a direct path – ‘line of sight’ – to the satellite. Other paths result from reflection of the same signal from some obstruction such as a building or mountain. Multipath causes problems because the signal arrival time at the receiver is different for each path, since the path length from receiver to transmitter is different for each path. Longer paths caused by reflections arrive at the receiver later than the direct path.
Multipath conditions can cause problems with receivers such as degraded location accuracy, degraded TTFF or degraded reacquisition time. Multipath testing is a kind of a metatest in that some of the above tests are done with the addition of multipath simulation of one or more satellites by the GPS signal simulator.
Other errors
Atmospheric conditions in the ionosphere or troposphere can cause additional errors in time of arrival and signal strength. Typically these errors lead to degraded location accuracy.
Antenna testing
Since there are no ideal antennas in the real world, real antennas will not have an isotropic response pattern. This means that the same signal coming to the antenna from different points in the sky can result in stronger or weaker signals and different signal phases being presented to the receiver front end.
Some GPS signal simulators can simulate this situation in conductive testing by allowing users to input an antenna response pattern and modify the signal strength from satellites accordingly. This, again, is a metatest done by repeating some of the above tests using a different antenna pattern.
Summary
This article has described the basic tests used in verification of GPS receivers. Although the fundamental types of tests are few (ie, TTFF, sensitivity and location accuracy), the variations and introductions of impairments to the GPS signal quickly expand the comprehensive list of tests required to completely verify GPS receiver functionality. The ability to recreate these signals in a reliable and repeatable manner requires the use of an RF GPS simulator. The simulator must be able to simulate real-world scenarios and have real-time signal generation capability for maximum flexibility in test signal creation.
The Agilent N7609B Signal Studio for GNSS, in conjunction with the N5106A PXB and N5182A MXG, is capable of providing this functionality. The general-purpose nature of the PXB/MXG platform also provides the flexibility to create not only GPS test signals but other wireless standards as well.
Bibliography
ION STD 101: Recommended Test Procedures for GPS Receivers, Revision C, Institute of Navigation, 1997 (ISBN: 0936406046)
| Tel: | +27 12 678 9200 |
| Email: | [email protected] |
| www: | www.concilium.co.za |
| Articles: | More information and articles about Concilium Technologies |


© Technews Publishing (Pty) Ltd | All Rights Reserved
 printer friendly version
printer friendly version